

- Even though there are many internal and external criticisms, IWT has managed to survive several wars and military standoffs between India and Pakistan.
- By hindering economic growth, the IWT has increased the domestic dispute over Kashmir. Kashmiris have grievances against the pact since it forbids India from using the western rivers for cultivation, hydroelectric generation, or navigation.
- The scientific community in India emphasizes the need for additional research and evaluations as a basis for debates on transboundary water management in the country.
- The treaty offers outdated technical guidance that is unable to address the ongoing technological disputes with Indus.
- The IWT is a permanent agreement that has no expiration date, in contrast to treaties like the 1964 Columbia River Treaty between the US and Canada, which allows either of its signatories to choose to renegotiate it after 50 years.
Overview
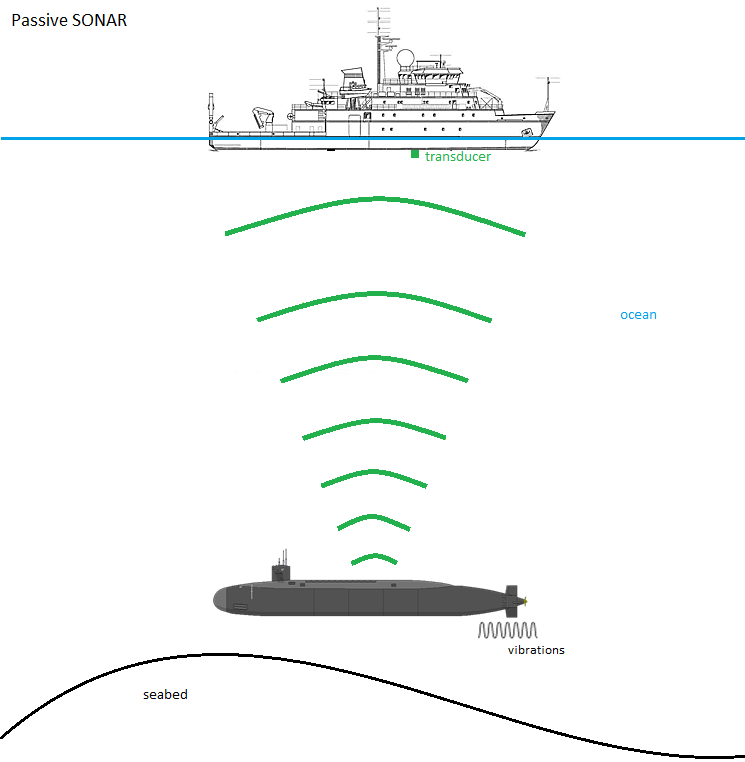
Passive sonar is a method for detecting acoustic signals in an underwater environment, usually the ocean. From a historical perspective, the main impetus for the research and development of passive sonar has been its military applications, particularly the acoustic detection of submarines. Passive sonar is a mature technology in the sense that improvements are expected to be incremental. Although the inexorable advancement of electronics continues to open new vistas for system improvement, progress is restrained by difficulty in algorithm development. For instance, many functions within current sonar systems would be highly advantageous to automate. Still, progress in algorithm development for automation has been slow to date, which drives us towards the industrialization and development of new and efficient algorithms for passive sonar simulation design and development.
Sonar Detection Range and Its Benefits
Sonar detection range is one of the most important indexes to investigate the performance of sonar equipment. The prediction of sonar action range plays a vital role in mastering sonar detection performance and improving the probability of target detection. The primary function of passive sonar is to detect a target in the context of ambient noise in the background and transmission loss related to underwater sound propagation.
The sonar performance model quantifies sonar performance in effective detection by careful and detailed analysis of terms associated with the passive sonar equation. Representation of transmission loss curve, low-frequency environment noise mapping curve solution,3D mapping of radiated noise, and receiver operating characteristic (ROC) using complex mathematical calculations Models are essential for effective use of sonar and help us visualize and solve real-world problems. With support receiver operating characteristics (ROC) for different values of SNR (signal to noise ratio), detection threshold (DT), and studying existing models and techniques for path loss, the effective range can be calculated.
The detected range can therefore be used to search or monitor any area of interest in the ocean and provide theoretical support for the effective use of sonar equipment. Range in terms of passive sonar states that according to detection probability and false alarm probability, how efficiently passive sonar can work and how much area can it cover given the detection probability and false alarm probability. The Probability of Detection (PD) is the probability of making a correct ‘signal present’ decision. It is the probability of saying that a “1” event is true, given that a “1” event occurred. The probability of False Alarm (Pfa) is the probability of making an incorrect ‘signal present’ decision. It is the probability of saying that event “1” is true given that event “0” occurred.
This can be a key benefit because it certainly increases the effective search area, and it can work efficiently at better locations. The deployment certainly depends upon the range of passive sonar so that we can easily cover our reason of interest and give valuable insights.
Passive Sonar:
Passive sonar is a method for detecting acoustic signals in an underwater environment, usually the ocean. The difference between passive and active sonar is that a passive solar system emits no signals; instead, its purpose is to detect the acoustic signals emanating from external sources. From an historical perspective, the main impetus for the research and development of passive sonar has been its military applications the acoustic detection of submarines. The pace of military research has abated in recent years, as the introduction of increasingly quiet submarines into service has shifted the focus to active sonar. However, new applications of passive sonar continue to appear; for example, a heightened awareness of environmental issues has spurred the development of passive techniques for detecting whales.
Unlike active sonar, only one-way propagation is involved. Because of the different signal processing used, the minimal detectable signal-to-noise ratio will be different. The equation for determining the performance of a passive sonar is:
SL − TL = NL − AG + DT
Here, the SL is the source level, PL is the propagation loss, NL is the noise level, AG is the array gain and DT is the detection threshold.
The figure of merit of a passive sonar is
FOM = SL + AG − (NL + DT).
Advancements in signal processing and oceanographic modelling
Work towards increasing sophisticated sonar performance prediction models predicting the fluctuations in the signal and background waveforms along with oceanographic features that cause them. Increasingly sophisticated sonar hardware and processing software, leading to a need for increasingly detailed modelling of linear or non-linear pressure and particle velocity fields; increasingly sophisticated knowledge and understanding of the oceanographic features responsible for fluctuations in both signal and background (surface waves, internal waves, multiscale seabed roughness, etc.); increasingly powerful computing facilities, leading to an increasing ability to model this detail, including closer integration of sonar models with oceanographic databases and ocean forecasting models.
Autonomous Platforms
Autonomy in the working of autonomous vehicles and sonar platforms can be applied in the field of oceanic survey, marine archaeology, military reconnaissance to execute a designated task. A possible scenario involves a group of small autonomous platforms working together or separately to execute a designated task. Specific applications for such platforms might include —
Ocean survey:
In this scenario, the vehicles gather data independently, exchanging findings with any neighboring platforms within acoustic communication distance, and surfacing occasionally to upload data, recharge batteries, and perhaps receive new instructions. Applications requiring less development or software might consist of a seabed survey, monitoring of 26 gas exchange processes with the atmosphere for climate analysis and its prediction and modelling, and documentation and counting of protected species.
Military reconnaissance or marine archaeology:
The vehicles rendezvous at a predetermined location and proper planning of any mission or specific task to be carried out to coordinate some covert measurements can be done successfully and with ease.
Effective deployment and vulnerability assessment
The vulnerability assessment is done by calculating the reverse SNR using the sonar equation. A reverse SNR map can be developed by considering and analyzing certain statistical models thus giving a closer look to the vulnerability aspect of any anti-submarine warfare. Various Quitting techniques can be used by studying the pattern of noise radiated by the submarines and deriving mechanisms and models to reduce the same. Effective deployment of sonar will take place where vulnerability of sonar is low, and the detection range is high.
Use of artificial neural networks (ANN) for estimating sound speed profile
Sound speed profile which is an input to the PE-RAM model is typically computed by traditional mathematical models. In the paper Jain, S., & Ali, M. M. (2006). Estimation of sound speed profiles using artificial neural networks. IEEE Geoscience and Remote Sensing Letters, 3(4), 467-470 discusses the following- Lack of direct observations of vertical profiles of velocimeters and/or temperature and salinity, from which sound speed can be calculated, limits specifications and investigation of temporal and spatial variabilities of the three-dimensional structure of the sound speed in the oceans. The parameters used in this study are net surface heat flux (NSHF), net radiation, sea surface wind stress (SSWS), dynamic height (DH), and vertical profiles of temperature and salinity. The vertical resolution of salinity is less compared with the temperature observations. We considered only 27 (6) depths, up to 250 m (about 820.21 ft), where temperature (salinity) measurements are available throughout. Due to these quality checks, we could not analyze SSPs during the entire months of February, August, and September 1995. Out of the total number of 8858 hourly observations, 5281 profiles have been used. We linearly interpolated salinity measurements to the temperature depths. Two types of DHs were calculated, namely, 1) using the temperature and interpolated salinity values (27 depths: DHI hereafter) and 2) using only the actual available salinity and corresponding temperature values (six depths: DHA hereafter). Page 31 of 38 In the paper cited above, The ANN-estimated SSPs had a root-mean-square error of 1.16 m/s and a coefficient of determination of 0.98. About 76% (93%) of the estimates lie within ±1 m/s (±2 m/s) of the SSPs obtained from in situ temperature and salinity profiles seems promising enough and more research can be ventured out in this direction.
INCLUDING NOISE FROM DARK SHIP DATA FOR ENHANCED ACCURACY
The noise from the dark ships can be included in the noise mapping for enhanced accuracy of the noise mapping. Although not much research is done on detecting the dark ships in the past, given the National Security concerns, it is slowly gaining pace. Detection of dark ships is first a herculean task. But once these dark ships are detected, and since these contribute to the ambient noise, they can be included in the model for better accuracy. Sea surface analysis can be used for ship detection from optical satellite images can be away forward in this domain. In the paper by Yang, Guang, et al. “Ship detection from optical satellite images based on sea surface analysis.” IEEE Geoscience and Remote Sensing Letters 11.3 (2013): 641-645, He discusses the following- Ship detection from remote sensing images is essential for traffic monitor, maritime management and illegal fishing surveillance. Synthetic aperture radar (SAR) images are often adopted for ship detection as they are less influenced by weather conditions and time, and they can be utilized to estimate velocities of moving targets However, SAR images are usually with high-level speckles, insensitive to wood materials, and difficult for human interpretation. Therefore, high-resolution panchromatic satellite images have recently been employed for ship detection, as they can provide more detailed information for small target detection and ship recognition. Page 28 of 38 Ship candidate selection and false alarm (caused by sea waves, ship wakes, clouds, etc.) elimination are two key issues for ship detection in optical images. Several notable methods have been presented in recent literature.
The method in selected ship candidates by morphological filtering and eliminated false candidates by wavelet analysis and Radon transform. Zhu et al. detected ships based on the SVM classifier with shape features and texture features, which could eliminate false alarms to some extent. Proia et al. assumed Gaussian distribution of the sea background density function and employed Bayesian decision theory to identify some small-sized ships. Inspired by human visual search, a multiscale and hierarchical method was proposed to detect ships with little computational time. These methods can achieve impressive results due to the robust ship descriptor and candidate classifier. However, ship appearance is not the only access for ship detection. The sea surface can provide more valuable information than the ship’s appearance. The proposed method efficiently blocks out no-ship regions and automatically assigns weights to intensity and texture abnormality to optimize detection performance. Compared with existing works, the proposed linear candidate selection function is more computational efficient. The experiments on panchromatic satellite images demonstrate that SDSSA not only outperforms the state-of-the-art methods on Recall, Precision running time but also is robust to some extreme cases (e.g., dark ships, low contrast, rough waves, ship wakes, and cloud coverage).
Use of statistical classifiers for target detection
Generally, in passive sonar, the targets are detected by sonar equation (with constant threshold) that increases the detection error in shallow water. This is a method for detecting targets in passive sonars using adaptive threshold. In this method, target signal (sound) is processed in time and frequency domain. For classifying, Bayesian classification is used, and posterior distribution is estimated by Maximum Likelihood Estimation algorithm. Finally, the target was detected by combining the detection points in both domains using Least Mean Square (LMS) adaptive filter. Results of this paper have shown that the proposed method has improved true detection rate by about 24% when compared other the best detection methods such as the LOFAR and DEMON analyses.
Why it is a crucial step
The first step towards this is automating the deployment decisions and predictions by passive sonar and minimizing the manual predictions and deployment decisions; to carry on this, we are focusing on range predictions for a passive sonar which is the essential key factor in decisions like deployment location of passive sonar.
There is a huge gap between the available resources and the seaweed produced. In this context, the scope to increase seaweed production in the country is huge and this requires active participation from different coastal states of India.
What’s Important to cultivate seaweed:
Site selection plays an important role in the success of any sustainable commercial farming operation. It significantly affects the economic returns and applicability of the agricultural system.
More research is needed on the effects of the most important abiotic factors such as nutrient availability, salinity, temperature, and underwater mild climate to reach the full potential of seaweed growing and nutrient neutralization.
Migration of oceanic species can also be tracked by these technologies that can help us with predicting the life movement of oceans and the after-effects of this and as an alarm for specific environmental and artificial changes.

Sanskar Soni, IIT Delhi
About Author
Sanskar Soni a 3rd-year B.Tech Student Pursuing Chemical Engineering at IIT Delhi, who has recently finished his internship at the MRC, Pune. He belongs to Alwar, Rajasthan, a beautiful city known for its beautiful parks and scenery. The author has great interest in the field of computational biology as his primary interest in developing breast cancer treatment and diagnosis, and he is an incoming summer intern at Piramal Pharma Limited.