

- AIS offers real-time data about vessels, such as their location, direction, speed, and identification.
- The proposed AIS-based Collision Avoidance and Navigation System has substantial potential to elevate safety in busy maritime conditions.
- After converting AIS data into a CSV format, I created visual representations of vessel paths.
The goal of the Collision Avoidance and Navigation System utilizing the Automatic Identification System (AIS) is to improve safety in maritime settings by harnessing AIS technology. AIS offers real-time data about vessels, such as their location, direction, speed, and identification. This information can be harnessed to create a smart system for avoiding collisions and navigating in busy maritime areas. This study suggests an extensive approach that combines AIS data with advanced algorithms and decision-making methods to foresee collision risks and assist in safe navigation.
The system uses past AIS data to study trends and pinpoint potential collision scenarios based on factors like vessel proximity, converging courses, and relative speeds. By integrating machine learning and data analysis, the system can generate a Collision Risk Index (CRI) for each vessel, indicating the level of collision risk it faces. This data can then be used to offer early alerts and suggestions to ship operators, enabling them to take proactive steps to prevent collisions. Furthermore, the system incorporates clever routing algorithms that incorporate the predicted collision risks to propose safer and more efficient vessel routes. By considering real-time AIS data, weather conditions, and traffic density, the system can optimize routes to decrease collision risks and enhance overall maritime safety.
The proposed AIS-based Collision Avoidance and Navigation System has substantial potential to elevate safety in busy maritime conditions. By using AIS data and advanced algorithms, it empowers proactive collision avoidance and wise routing choices, diminishing the chances of collisions and enhancing the effectiveness of vessel navigation. Further study and development are necessary to verify and refine the system’s performance in real-world situations.
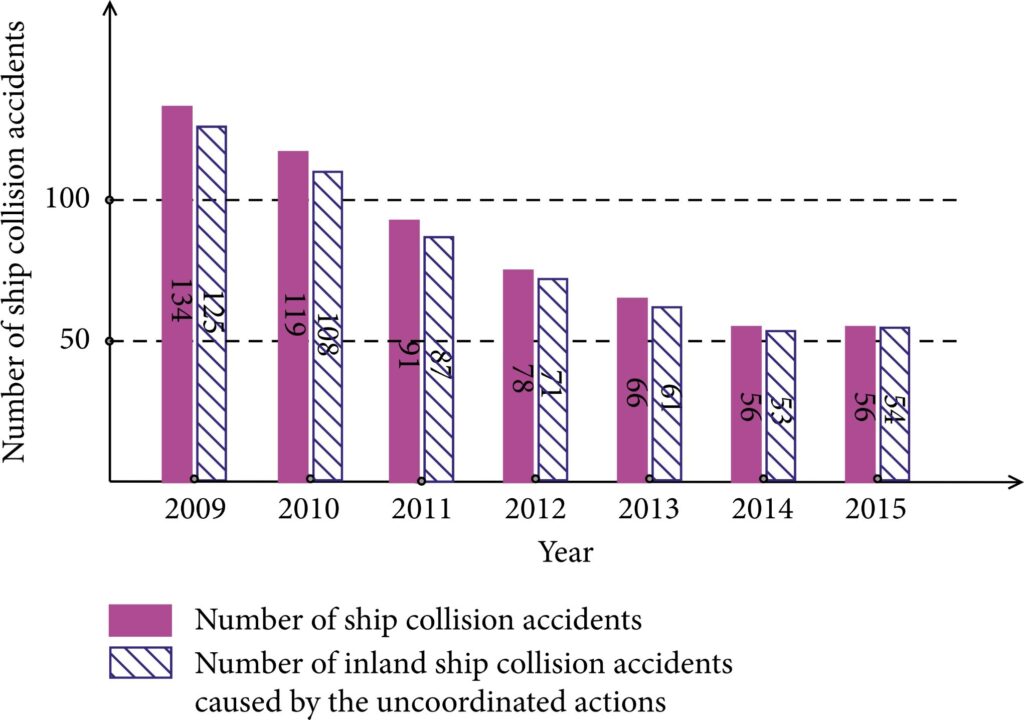
Collisions in inland waterways pose the most significant threat to inland water transportation. Research indicates that a substantial portion of maritime accidents, around 80%, and ship collisions, ranging from 86% to 95%, result from human error. As a result, quantifying the impact of human error is crucial for maritime safety. The European Maritime Safety Agency (EMSA) documented over 20,000 maritime casualties and incidents globally between 2011 and 2017. Some of these conflicts have led to severe accidents that had a notable environmental impact and sadly resulted in loss of life. Therefore, it is vital for ship captains engaged in maneuvers to accurately predict their future position relative to target ships within a specific timeframe to effectively handle close encounter situations.
Therefore, it becomes paramount for ship captains engaged in maneuvers to accurately anticipate their forthcoming position relative to other vessels within a designated time frame. This foresight enables them to effectively address close encounter situations.
Several fundamental components and features constitute a Collision Avoidance System within the maritime sector:
- Radar: Utilized to detect and track nearby vessels, radar provides crucial information about their positions and
- Automatic Identification System (AIS): AIS offers real-time data on vessel identification, position, course, and speed, aiding in situational awareness and collision
- Electronic Chart Display and Information System (ECDIS): ECDIS provides electronic navigational charts and related data, helping mariners navigate accurately and avoid potentia
- Alarm Systems: These systems notify the crew of impending dangers, allowing swift reactions to potential collisions or hazardous
- Collision Avoidance Algorithms and Maneuvering Assistance: These algorithms analyze data from various sources and provide suggestions for safe maneuvers to avoid
While the Collision Avoidance System significantly elevates safety and collision prevention, the ultimate responsibility for sound seamanship and appropriate decision-making rests with the ship’s crew. They must interpret and act upon the information provided by these systems to ensure safe navigation and effective collision avoidance.
Current Scenarios:
- ManhCuong Nguyen, Shufang Zhang, and Xiaoye Wang’s research aimed to create a mathematical framework for predicting the likelihood of vessel collisions using AIS They identified limitations in relying solely on the Distance of the Closest Point of Approach (DCPA) and Time to the Closest Point of Approach (TCPA) for collision estimation. Their study highlighted scenarios where DCPA is always zero, leading to incorrect immediate collision predictions in the same lane, and situations where slower-moving ships are inaccurately deemed collision-free. To address these issues, they introduced the Collision Risk Index (CRI), a comprehensive metric considering factors such as TCPA, distance, speed, and angle between vessels. Their dynamic visualization results demonstrated the practicality of this collision risk assessment model. The authors proposed integrating the model into AIS to enable sailors to assess collision risk promptly and accurately, facilitating the application of COLREGS-72 collision avoidance principles. They suggested implementing a compact embedded system with the assessment model on smaller vessels and fishing boats lacking ARPA systems. Furthermore, the model could be employed at base stations, VTS centers, and NoC for monitoring, management, and issuing hazard warnings within operational zones.
- Haiqing Shen’s study utilized deep reinforcement learning (DRL) to automate collision avoidance for multiple ships. Their methodology incorporated ship maneuverability, human expertise, and navigation rules, leveraging AIS Through numerical simulations and model experiments involving three self-propelled ships, they thoroughly evaluated their approach. They harnessed deep-learning libraries, Theano and Keras, along with real-time visual representations using Pygame to expedite learning and develop an efficient RL (Reinforcement Learning) model. This approach holds promise for achieving autonomous collision avoidance in ships, contributing to the advancement of autonomous ship technology.
- A novel visual analytic tool based on AIS data was introduced to analyze maritime traffic in a spatio-temporal context, as presented by a study. This tool offered an innovative perspective on the macroscopic safety structure of fairways and individual vessels, supported by microscopic evidence. Using a 7-day AIS trajectory dataset from the Mexican Gulf, the tool effectively demonstrated its capability to analyze spatio-temporal ship positions and identify areas of potential The tool was able to detect real accident cases, providing valuable insights into navigational safety behavior for both vessels and water areas.
- Perera’s assessment involved a collision avoidance system incorporating fuzzy theory-based decision-making and Bayesian network modules. Their focus was on intelligent collision avoidance integration into ocean navigation systems using AIS By implementing minor adjustments like speed and heading changes, close encounters could be mitigated, reducing overall risk, and improving traffic flow. This study emphasized proactive collision avoidance measures, suggesting early actions as much as 30 minutes before the closest point of approach. Ship navigators’ high-level situation awareness played a key role in these predictions, with mental models categorizing ship behavior and transition functions capturing future dynamics. The study explored leveraging historical AIS data and machine learning techniques to enhance prediction accuracy and emulate human situation awareness mechanisms. Clustering historical AIS trajectories and utilizing machine-learning regression techniques improved trajectory prediction and pattern matching, enhancing proactive collision avoidance.
- An important aspect of safe navigation for autonomous ships involves judging the Collision Risk Index (CRI). To address conventional inference model limitations, a study proposed an inference model using Artificial Neural Network (ANN). This model considered multiple parameters like ship speeds, courses, bearings, and distances to effectively express different CRI values, enabling appropriate collision avoidance The proposed ANN-based method exhibited superior decision-making capabilities compared to conventional models, offering improved navigation safety.
Proposed Situation:
The proposed approach utilizes both static and dynamic information from the Automatic Identification System (AIS) data. In situations indicating potential near collisions, the method initially identifies the closest points of possible ship-ship collision (CPC). This determination is based on ship specifications like length and breadth, along with the geographical positions of the vessels.
The Closest Point of Approach (CPA) time is then computed and utilized as an input for a mathematical or machine learning model. This model employs these inputs to calculate the Collision Risk Index (CRI). If the calculated CRI surpasses a predefined threshold, an alarm is activated to notify the ship’s crew.
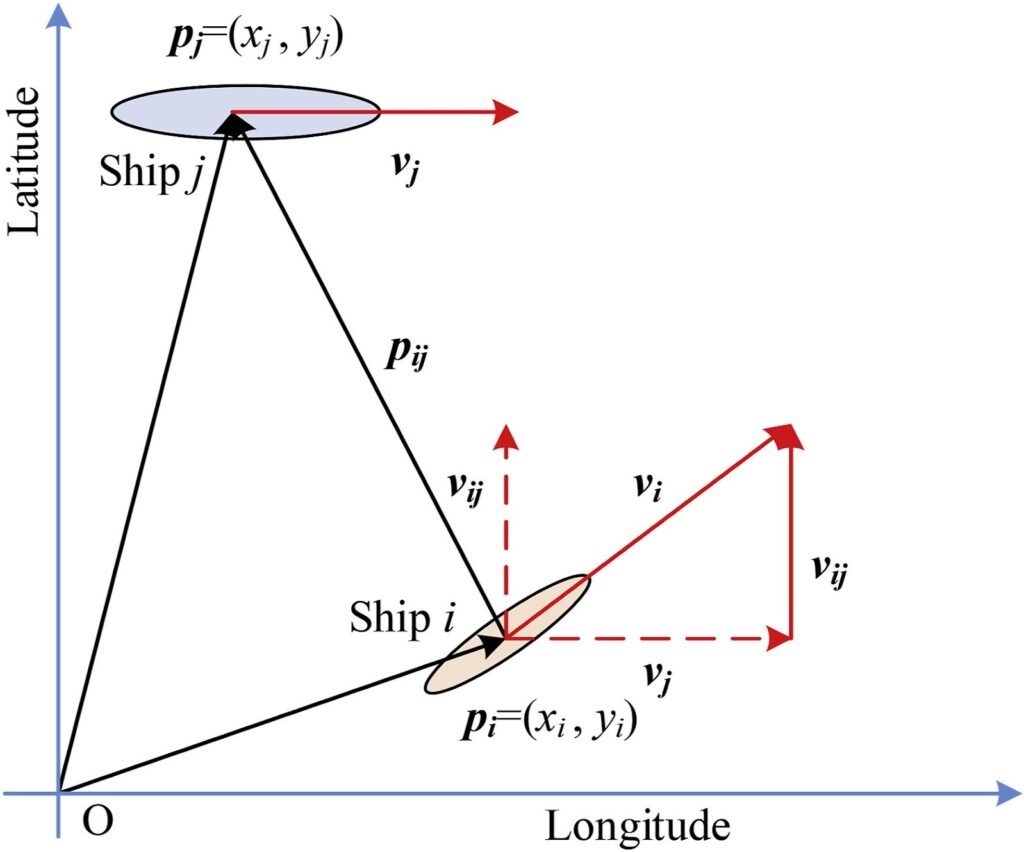
By applying fundamental principles of kinematics, it becomes feasible to ascertain the relative speed, position, and acceleration of the involved vessels. Utilizing these parameters, the time required for a collision can be estimated. Subsequently, the Collision Risk Index (CRI) is derived, incorporating this collision time, with the CRI inversely proportional to the calculated time until collision. By comparing the resulting CRI with a predefined threshold, timely alerts can be generated for the ship’s crew.
My Work:
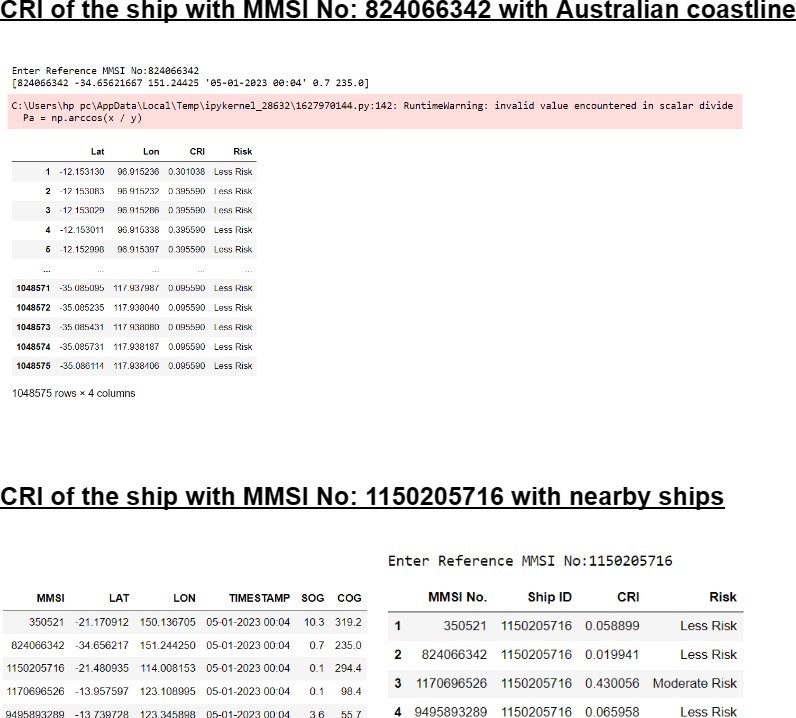
After converting AIS data into a CSV format, I created visual representations of vessel paths. Subsequently, I computed the Collision Risk Index (CRI) for vessels in proximity to both other ships and land. Using this data, I classified situations into risk categories: low, medium, and high. These categories serve as a foundation for assessing and assigning the CRI of specific trajectories. By integrating real-time AIS data, we can further enhance the accuracy of the CRI, resulting in improved risk evaluation.


Future Scope:
Incorporating AIS data along with parameters like Closest Point of Approach (CPA), Distance to Closest Point of Approach (DCPA), and Time to Closest Point of Approach (TCPA) into a machine learning model that utilizes historical data has the potential to significantly enhance the precision of trajectory prediction. By integrating these factors into the machine learning algorithm, the model can analyze past patterns and behaviors, enabling it to forecast safe trajectories. This amalgamation of real-time AIS data and historical data-driven predictions has the capability to bolster accuracy and offer more dependable trajectory information for collision avoidance systems.
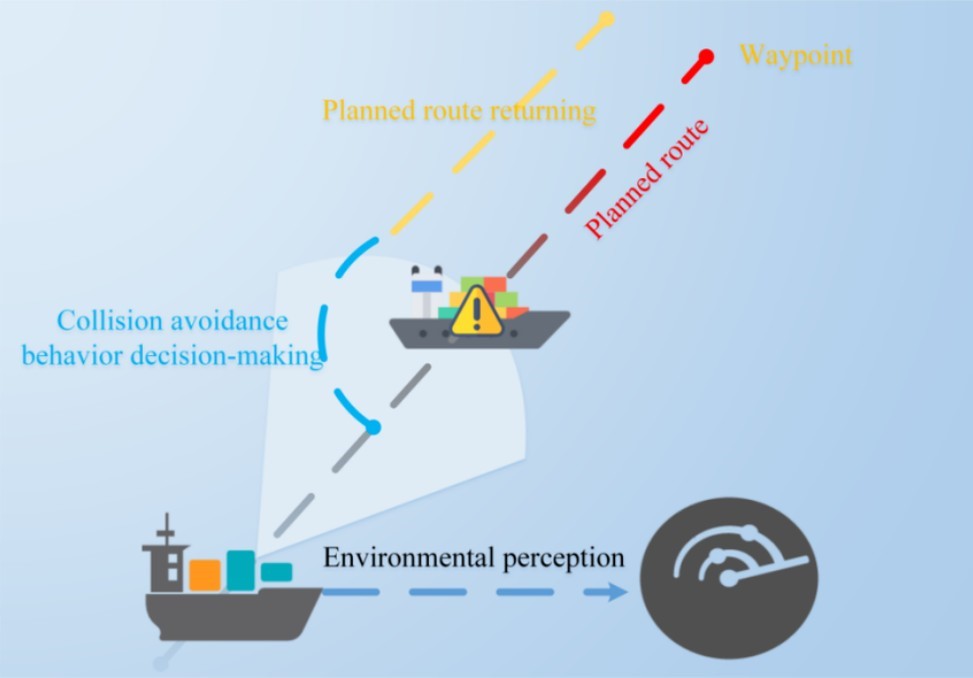
Intelligent Automation: The fusion of AIS with autonomous and semi-autonomous navigation systems can facilitate intelligent automation in collision avoidance. Vessels equipped with AIS and advanced algorithms can autonomously identify and circumvent collision risks, optimize navigation routes, and ensure secure operations, reminiscent of the principles behind self-driving cars.
Enhanced Data Integration: AIS data can be seamlessly combined with other sensor technologies like radar, lidar, and cameras to establish a more holistic and precise representation of the vessel’s surroundings. This integration has the potential to enhance collision risk assessment and enable more efficacious decision-making processes.

Aman Bansal, IIT Roorkee
About Author
Aman Bansal completed the Bachelor of Technology studies from IIT Roorkee. He has interest in Data Analytics and Software Development and has previously worked on Rainfall Data of Himalayan Region to find relationship between landslides and rainfall and based on the Data Analysis performed published poster in American Geophysical Union in December 2022. In addition, he has worked in startups as a Software Developer as well and is open to challenges where he can apply Software and Data Analytics to take mindful decision.